Tutorial-Developer¶
Code Structure¶
DI-engine¶
ding
├── config (Configuration files and utils)
│ ├── config.py
│ └── utils.py
├── design (Design diagrams)
├── docs
│ ├── Makefile
│ └── source
├── entry (Entries for various pipelines and CLI)
│ ├── application_entry.py
│ ├── cli.py
│ ├── dist_entry.py
│ ├── parallel_entry.py
│ ├── predefined_config.py
│ ├── serial_entry.py
│ ├── serial_entry_il.py
│ └── serial_entry_reward_model.py
├── envs (Environment and its wrappers & manager)
│ ├── common
│ ├── env
│ ├── env_manager
│ └── env_wrappers
├── hpc_rl (HPC module for DI-engine)
│ ├── README.md
│ └── wrapper.py
├── interaction (An interactive service framework)
│ ├── base
│ ├── config
│ ├── exception
│ ├── master
│ └── slave
├── league (League training module)
│ ├── algorithm.py
│ ├── base_league.py
│ ├── one_vs_one_league.py
│ ├── player.py
│ ├── shared_payoff.py
│ └── starcraft_player.py
├── model (RL neural network)
│ ├── common (Common encoders and heads)
│ ├── template (Template models used in some RL algorithms)
│ └── wrapper (Model wrapper)
├── policy (RL policy)
│ ├── a2c.py
│ ├── atoc.py
│ ├── base_policy.py (Policy base class)
│ ├── c51.py
│ ├── collaq.py
│ ├── coma.py
│ ├── command_mode_policy_instance.py
│ ├── common_utils.py
│ ├── ddpg.py
│ ├── dqn.py
│ ├── il.py
│ ├── impala.py
│ ├── iqn.py
│ ├── policy_factory.py
│ ├── ppg.py
│ ├── ppo.py
│ ├── qmix.py
│ ├── qrdqn.py
│ ├── r2d2.py
│ ├── rainbow.py
│ ├── sac.py
│ ├── sqn.py
│ └── td3.py
├── reward_model (Reward model module, including IRL, HER, RND)
│ ├── base_reward_model.py
│ ├── gail_irl_model.py
│ ├── her_reward_model.py
│ ├── pdeil_irl_model.py
│ ├── pwil_irl_model.py
│ ├── red_irl_model.py
│ └── rnd_reward_model.py
├── rl_utils (Utils for RL)
│ ├── a2c.py
│ ├── adder.py
│ ├── beta_function.py
│ ├── coma.py
│ ├── exploration.py
│ ├── gae.py
│ ├── isw.py
│ ├── ppg.py
│ ├── ppo.py
│ ├── td.py
│ ├── tests
│ ├── upgo.py
│ ├── value_rescale.py
│ └── vtrace.py
├── scripts (Command line scripts)
│ ├── dijob-qbert.yaml
│ ├── kill.sh
│ ├── local_parallel.sh
│ ├── local_serial.sh
│ ├── slurm_dist.sh
│ ├── slurm_dist_multi_gpu.sh
│ └── slurm_parallel.sh
├── torch_utils (Utils related to PyTorch)
│ ├── checkpoint_helper.py
│ ├── data_helper.py
│ ├── distribution.py
│ ├── loss
│ ├── math_helper.py
│ ├── metric.py
│ ├── network
│ ├── nn_test_helper.py
│ └── optimizer_helper.py
├── utils (Common utils)
│ ├── autolog
│ ├── collection_helper.py
│ ├── compression_helper.py
│ ├── data
│ ├── default_helper.py
│ ├── design_helper.py
│ ├── fake_linklink.py
│ ├── file_helper.py
│ ├── import_helper.py
│ ├── k8s_helper.py
│ ├── linklink_dist_helper.py
│ ├── loader
│ ├── lock_helper.py
│ ├── log_helper.py
│ ├── pytorch_ddp_dist_helper.py
│ ├── registry.py
│ ├── registry_factory.py
│ ├── segment_tree.py
│ ├── slurm_helper.py
│ ├── system_helper.py
│ ├── time_helper.py
│ └── type_helper.py
└── worker
├── adapter
│ └── learner_aggregator.py
├── collector
│ ├── base_parallel_collector.py
│ ├── base_serial_collector.py
│ ├── base_serial_evaluator.py
│ ├── comm
│ ├── episode_serial_collector.py
│ ├── one_vs_one_collector.py
│ ├── sample_serial_collector.py
│ └── zergling_collector.py
├── coordinator (Central coordinator)
│ ├── base_parallel_commander.py
│ ├── base_serial_commander.py
│ ├── comm_coordinator.py
│ ├── coordinator.py
│ ├── one_vs_one_parallel_commander.py
│ ├── operator_server.py
│ ├── resource_manager.py
│ └── solo_parallel_commander.py
├── learner
│ ├── base_learner.py
│ ├── comm
│ └── learner_hook.py
└── replay_buffer
├── advanced_buffer.py
├── base_buffer.py
├── episode_buffer.py
├── naive_buffer.py
└── utils.py
Note
This file tree omits files like __init__.py and test (including CI test files)
DI-zoo¶
dizoo
├── atari
├── box2d
│ ├── bipedalwalker
│ └── lunarlander
├── classic_control
│ ├── bitflip
│ ├── cartpole
│ └── pendulum
├── common
├── competitive_rl
├── gfootball
├── mujoco
├── multiagent_particle
├── pomdp
└── smac
Note
Each env may contain folders: config (Confg file), Entry (Customized entry), envs (Env that derived from DI-engine base env)
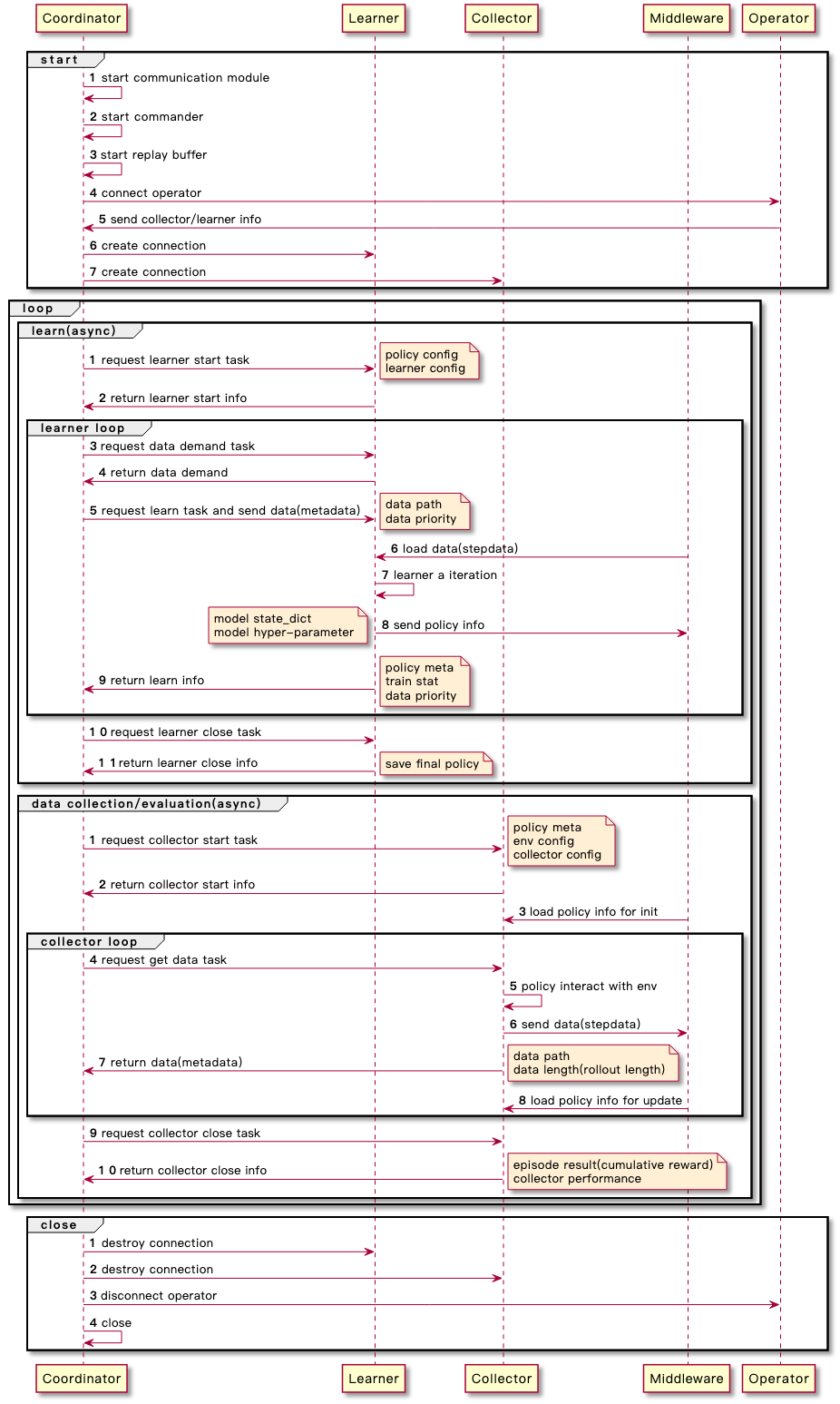
Data Flow¶
Each training instance of DI-engine can mainly divides 3 parts——Coordinator, Learner, Collector, and some support Middleware, which is shown as follows:

And the sequence relation of them can be described in the next image: