DDPG¶
Overview¶
Deep Deterministic Policy Gradient (DDPG), proposed in the 2015 paper Continuous control with deep reinforcement learning, is an algorithm which learns a Q-function and a policy simultaneously. DDPG is an actor-critic, model-free algorithm based on the deterministic policy gradient(DPG) that can operate over high-dimensional, continuous action spaces. DPG Deterministic policy gradient algorithms algorithm is similar to NFQCA.
Quick Facts¶
DDPG is only used for environments with continuous action spaces.(i.e. MuJoCo)
DDPG is an off-policy algorithm.
DDPG is a model-free and actor-critic RL algorithm, which optimizes actor network and critic network, respectively.
Usually, DDPG use Ornstein-Uhlenbeck process or Gaussian process (default in our implementation) for exploration.
Key Equations or Key Graphs¶
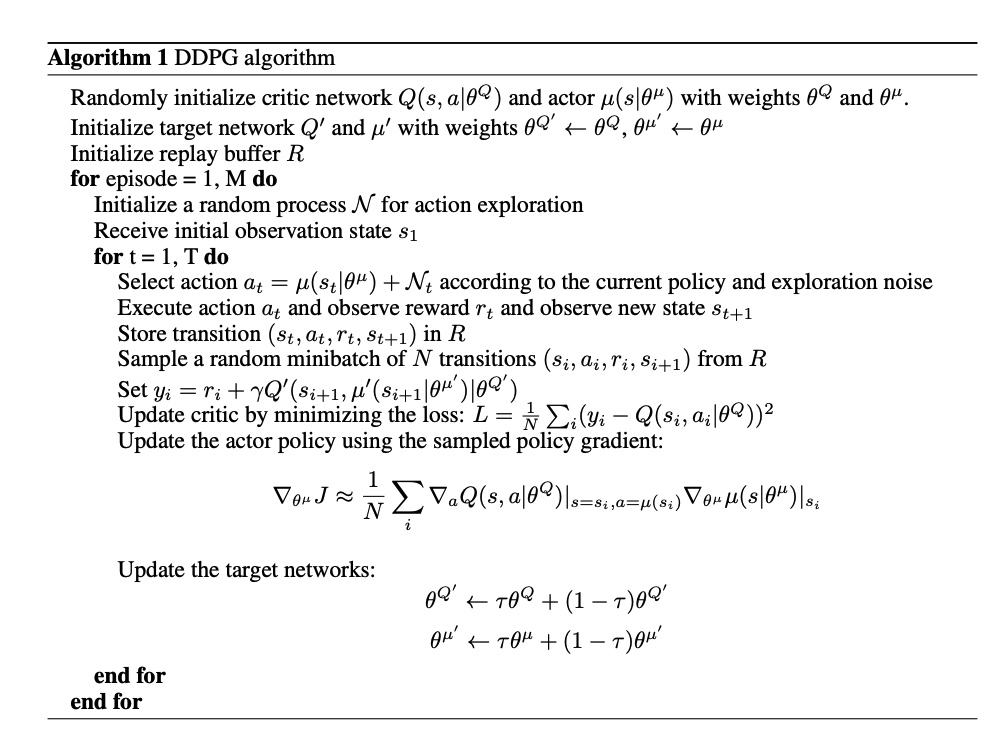
The DDPG algorithm maintains a parameterized actor function \(\mu\left(s \mid \theta^{\mu}\right)\) which specifies the current policy by deterministically mapping states to a specific action. The critic \(Q(s, a)\) is learned using the Bellman equation as in Q-learning. The actor is updated by following the applying the chain rule to the expected return from the start distribution \(J\) with respect to the actor parameters:
DDPG uses a replay buffer to guarantee that the samples are independently and identically distributed.
To keep neural networks stable in many environments, DDPG uses “soft” target updates for actor-critic and using. Specifically, DDPG creates a copy of the actor and critic networks, \(Q(s, a|\theta^{Q'})\) and \(\mu' \left(s \mid \theta^{\mu'}\right)\) respectively, that are used for calculating the target values. The weights of these target networks are then updated by having them slowly track the learned networks:
where \(\tau<<1\). This means that the target values are constrained to change slowly, greatly improving the stability of learning.
A major challenge of learning in continuous action spaces is exploration. The exploration policy is independent from the learning algorithm trough adding noise sampled from a noise process N to actor policy:
Pseudocode¶
Extensions¶
- DDPG can be combined with:
Target Network
Continuous control with deep reinforcement learning proposes soft target updates used to keep the network training stable. Since we implement soft update Target Network for actor-critic through
TargetNetworkWrapperinmodel_wrapand configuringlearn.target_theta.Replay Buffers
DDPG/TD3 random-collect-size is set to 25000 by default, while it is 25000 for SAC. We only simply follow SpinningUp default setting and use random policy to collect initialization data. We configure
random_collect_sizefor data collection.Gaussian noise during collecting transition.
For the exploration noise process DDPG uses temporally correlated noise in order to explore well in physical environments that have momentum. Specifically, DDPG uses Ornstein-Uhlenbeck process with \(\theta = 0.15\) and \(\sigma = 0.2\). The Ornstein-Uhlenbeck process models the velocity of a Brownian particle with friction, which results in temporally correlated values centered around 0. However, we use Gaussian noise instead of Ornstein-Uhlenbeck noise due to too many hyper-parameters of Ornstein-Uhlenbeck noise. We configure
collect.noise_sigmato control the exploration.
Implementations¶
The default config is defined as follows:
- class ding.policy.ddpg.DDPGPolicy(cfg: dict, model: Optional[Union[type, torch.nn.modules.module.Module]] = None, enable_field: Optional[List[str]] = None)[source]
- Overview:
Policy class of DDPG algorithm.
- Property:
learn_mode, collect_mode, eval_mode
Config:
ID
Symbol
Type
Default Value
Description
Other(Shape)
1
typestr
ddpg
RL policy register name, referto registryPOLICY_REGISTRYthis arg is optional,a placeholder2
cudabool
True
Whether to use cuda for network3
random_collect_sizeint
25000
Number of randomly collectedtraining samples in replaybuffer when training starts.Default to 25000 forDDPG/TD3, 10000 forsac.4
model.twin_criticbool
False
Whether to use two criticnetworks or only one.Default False forDDPG, Clipped DoubleQ-learning method inTD3 paper.5
learn.learning_rate_actorfloat
1e-3
Learning rate for actornetwork(aka. policy).6
learn.learning_rate_criticfloat
1e-3
Learning rates for criticnetwork (aka. Q-network).7
learn.actor_update_freqint
2
When critic network updatesonce, how many times will actornetwork update.Default 1 for DDPG,2 for TD3. DelayedPolicy Updates methodin TD3 paper.8
learn.noisebool
False
Whether to add noise on targetnetwork’s action.Default False forDDPG, True for TD3.Target Policy Smoo-thing Regularizationin TD3 paper.9
learn.-ignore_donebool
False
Determine whether to ignoredone flag.Use ignore_done onlyin halfcheetah env.10
learn.-target_thetafloat
0.005
Used for soft update of thetarget network.aka. Interpolationfactor in polyak averaging for targetnetworks.11
collect.-noise_sigmafloat
0.1
Used for add noise during co-llection, through controllingthe sigma of distributionSample noise from distribution, Ornstein-Uhlenbeck process inDDPG paper, Guassianprocess in ours.
Model¶
Here we provide examples of QAC model as default model for DDPG.
- class ding.model.template.qac.QAC(obs_shape: Union[int, ding.utils.type_helper.SequenceType], action_shape: Union[int, ding.utils.type_helper.SequenceType], actor_head_type: str, twin_critic: bool = False, actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Optional[torch.nn.modules.module.Module] = ReLU(), norm_type: Optional[str] = None)[source]¶
- Overview:
The QAC model.
- Interfaces:
__init__,forward,compute_actor,compute_critic
- __init__(obs_shape: Union[int, ding.utils.type_helper.SequenceType], action_shape: Union[int, ding.utils.type_helper.SequenceType], actor_head_type: str, twin_critic: bool = False, actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Optional[torch.nn.modules.module.Module] = ReLU(), norm_type: Optional[str] = None) → None[source]¶
- Overview:
Init the QAC Model according to arguments.
- Arguments:
obs_shape (
Union[int, SequenceType]): Observation’s space.action_shape (
Union[int, SequenceType]): Action’s space.actor_head_type (
str): Whether chooseregressionorreparameterization.twin_critic (
bool): Whether include twin critic.actor_head_hidden_size (
Optional[int]): Thehidden_sizeto pass to actor-nn’sHead.- actor_head_layer_num (
int): The num of layers used in the network to compute Q value output for actor’s nn.
- actor_head_layer_num (
critic_head_hidden_size (
Optional[int]): Thehidden_sizeto pass to critic-nn’sHead.- critic_head_layer_num (
int): The num of layers used in the network to compute Q value output for critic’s nn.
- critic_head_layer_num (
- activation (
Optional[nn.Module]): The type of activation function to use in
MLPthe afterlayer_fn, ifNonethen default set tonn.ReLU()
- activation (
- norm_type (
Optional[str]): The type of normalization to use, see
ding.torch_utils.fc_blockfor more details.
- norm_type (
- compute_actor(inputs: torch.Tensor) → Dict[source]¶
- Overview:
Use encoded embedding tensor to predict output. Execute parameter updates with
'compute_actor'mode Use encoded embedding tensor to predict output.- Arguments:
- inputs (
torch.Tensor): The encoded embedding tensor, determined with given
hidden_size, i.e.(B, N=hidden_size).hidden_size = actor_head_hidden_size
- inputs (
mode (
str): Name of the forward mode.
- Returns:
outputs (
Dict): Outputs of forward pass encoder and head.
- ReturnsKeys (either):
action (
torch.Tensor): Continuous action tensor with same size asaction_shape.- logit (
torch.Tensor): Logit tensor encoding
muandsigma, both with same size as inputx.
- logit (
- Shapes:
inputs (
torch.Tensor): \((B, N0)\), B is batch size and N0 corresponds tohidden_sizeaction (
torch.Tensor): \((B, N0)\)logit (
list): 2 elements, mu and sigma, each is the shape of \((B, N0)\).q_value (
torch.FloatTensor): \((B, )\), B is batch size.
- Examples:
>>> # Regression mode >>> model = QAC(64, 64, 'regression') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 64]) >>> # Reparameterization Mode >>> model = QAC(64, 64, 'reparameterization') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> actor_outputs['logit'][0].shape # mu >>> torch.Size([4, 64]) >>> actor_outputs['logit'][1].shape # sigma >>> torch.Size([4, 64])
- compute_critic(inputs: Dict) → Dict[source]¶
- Overview:
Execute parameter updates with
'compute_critic'mode Use encoded embedding tensor to predict output.- Arguments:
obs,actionencoded tensors.mode (
str): Name of the forward mode.
- Returns:
outputs (
Dict): Q-value output.
- ReturnKeys:
q_value (
torch.Tensor): Q value tensor with same size as batch size.
- Shapes:
obs (
torch.Tensor): \((B, N1)\), where B is batch size and N1 isobs_shapeaction (
torch.Tensor): \((B, N2)\), where B is batch size and N2 isaction_shapeq_value (
torch.FloatTensor): \((B, )\), where B is batch size.
- Examples:
>>> inputs = {'obs': torch.randn(4, N), 'action': torch.randn(4, 1)} >>> model = QAC(obs_shape=(N, ),action_shape=1,actor_head_type='regression') >>> model(inputs, mode='compute_critic')['q_value'] # q value tensor([0.0773, 0.1639, 0.0917, 0.0370], grad_fn=<SqueezeBackward1>)
- forward(inputs: Union[torch.Tensor, Dict], mode: str) → Dict[source]¶
- Overview:
Use bbservation and action tensor to predict output. Parameter updates with QAC’s MLPs forward setup.
- Arguments:
- Forward with
'compute_actor': - inputs (
torch.Tensor): The encoded embedding tensor, determined with given
hidden_size, i.e.(B, N=hidden_size). Whetheractor_head_hidden_sizeorcritic_head_hidden_sizedepend onmode.
- inputs (
- Forward with
'compute_critic', inputs (Dict) Necessary Keys: obs,actionencoded tensors.
mode (
str): Name of the forward mode.
- Forward with
- Returns:
outputs (
Dict): Outputs of network forward.- Forward with
'compute_actor', Necessary Keys (either): action (
torch.Tensor): Action tensor with same size as inputx.- logit (
torch.Tensor): Logit tensor encoding
muandsigma, both with same size as inputx.
- logit (
- Forward with
'compute_critic', Necessary Keys: q_value (
torch.Tensor): Q value tensor with same size as batch size.
- Forward with
- Actor Shapes:
inputs (
torch.Tensor): \((B, N0)\), B is batch size and N0 corresponds tohidden_sizeaction (
torch.Tensor): \((B, N0)\)q_value (
torch.FloatTensor): \((B, )\), where B is batch size.
- Critic Shapes:
obs (
torch.Tensor): \((B, N1)\), where B is batch size and N1 isobs_shapeaction (
torch.Tensor): \((B, N2)\), where B is batch size and N2 is``action_shape``logit (
torch.FloatTensor): \((B, N2)\), where B is batch size and N3 isaction_shape
- Actor Examples:
>>> # Regression mode >>> model = QAC(64, 64, 'regression') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 64]) >>> # Reparameterization Mode >>> model = QAC(64, 64, 'reparameterization') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> actor_outputs['logit'][0].shape # mu >>> torch.Size([4, 64]) >>> actor_outputs['logit'][1].shape # sigma >>> torch.Size([4, 64])
- Critic Examples:
>>> inputs = {'obs': torch.randn(4,N), 'action': torch.randn(4,1)} >>> model = QAC(obs_shape=(N, ),action_shape=1,actor_head_type='regression') >>> model(inputs, mode='compute_critic')['q_value'] # q value tensor([0.0773, 0.1639, 0.0917, 0.0370], grad_fn=<SqueezeBackward1>)
Train actor-critic model¶
First, we initialize actor and critic optimizer in _init_learn, respectively.
Setting up two separate optimizers can guarantee that we only update actor network parameters and not critic network when we compute actor loss, vice versa.
# actor and critic optimizer self._optimizer_actor = Adam( self._model.actor.parameters(), lr=self._cfg.learn.learning_rate_actor, weight_decay=self._cfg.learn.weight_decay ) self._optimizer_critic = Adam( self._model.critic.parameters(), lr=self._cfg.learn.learning_rate_critic, weight_decay=self._cfg.learn.weight_decay )
- In
_forward_learnwe update actor-critic policy through computing critic loss, updating critic network, computing actor loss, and updating actor network. critic loss computationcurrent and target value computation
# current q value q_value = self._learn_model.forward(data, mode='compute_critic')['q_value'] q_value_dict = {} if self._twin_critic: q_value_dict['q_value'] = q_value[0].mean() q_value_dict['q_value_twin'] = q_value[1].mean() else: q_value_dict['q_value'] = q_value.mean() # target q value. SARSA: first predict next action, then calculate next q value with torch.no_grad(): next_action = self._target_model.forward(next_obs, mode='compute_actor')['action'] next_data = {'obs': next_obs, 'action': next_action} target_q_value = self._target_model.forward(next_data, mode='compute_critic')['q_value']
loss computation
if self._twin_critic: # TD3: two critic networks target_q_value = torch.min(target_q_value[0], target_q_value[1]) # find min one as target q value # network1 td_data = v_1step_td_data(q_value[0], target_q_value, reward, data['done'], data['weight']) critic_loss, td_error_per_sample1 = v_1step_td_error(td_data, self._gamma) loss_dict['critic_loss'] = critic_loss # network2(twin network) td_data_twin = v_1step_td_data(q_value[1], target_q_value, reward, data['done'], data['weight']) critic_twin_loss, td_error_per_sample2 = v_1step_td_error(td_data_twin, self._gamma) loss_dict['critic_twin_loss'] = critic_twin_loss td_error_per_sample = (td_error_per_sample1 + td_error_per_sample2) / 2 else: # DDPG: single critic network td_data = v_1step_td_data(q_value, target_q_value, reward, data['done'], data['weight']) critic_loss, td_error_per_sample = v_1step_td_error(td_data, self._gamma) loss_dict['critic_loss'] = critic_loss
critic network update
self._optimizer_critic.zero_grad() for k in loss_dict: if 'critic' in k: loss_dict[k].backward() self._optimizer_critic.step()
actor loss
actor_data = self._learn_model.forward(data['obs'], mode='compute_actor') actor_data['obs'] = data['obs'] if self._twin_critic: actor_loss = -self._learn_model.forward(actor_data, mode='compute_critic')['q_value'][0].mean() else: actor_loss = -self._learn_model.forward(actor_data, mode='compute_critic')['q_value'].mean() loss_dict['actor_loss'] = actor_loss
actor network update
# actor update self._optimizer_actor.zero_grad() actor_loss.backward() self._optimizer_actor.step()
Target Network¶
We implement Target Network trough target model initialization in _init_learn.
We configure learn.target_theta to control the interpolation factor in averaging.
# main and target models
self._target_model = copy.deepcopy(self._model)
self._target_model = model_wrap(
self._target_model,
wrapper_name='target',
update_type='momentum',
update_kwargs={'theta': self._cfg.learn.target_theta}
)
The Benchmark result of DDPG implemented in DI-engine is shown in Benchmark
Other Public Implementations¶
References¶
Timothy P. Lillicrap, Jonathan J. Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, Daan Wierstra: “Continuous control with deep reinforcement learning”, 2015; [http://arxiv.org/abs/1509.02971 arXiv:1509.02971].